Το project ξεκίνησε από το απλό ερώτημα / σκέψη: γιατί να μη μπορούν να ρυθμίζονται τα φώτα στο V-Strom με (ηλεκτρο-)μηχανικό τρόπο όπως στα αυτοκίνητα ?
Στην αρχή έπεσαν στο τραπέζι διάφοροι τρόποι, όμως κατέληξα να υλοποιήσω τον πιο απλό: να προσαρμοστούν κατάλληλοι ηλεκτροκινητήρες (μοτεράκια) στους υπάρχοντες χειροκίνητους ρυθμιστές.
Εδώ τέθηκαν τρία ερωτήματα: τι μοτεράκια θα ήταν αυτά, πως θα στηρίζονταν και πως θα μεταδίδονταν η κίνηση στους ρυθμιστές ?
Έπειτα από συζητήσεις με φίλους μοντελιστές, διεξοδική έρευνα αγοράς και ανταλλαγή αρκετών email με σχετικές εταιρείες, κατέληξα σε αυτά:
της Actobotics που ήταν μικρά σε μέγεθος (56mm x 25mm), λειτουργούσαν στα 12V και είχαν διάφορους τρόπους στήριξης και μετάδοσης της κίνησης μέσω παρεχόμενων αξεσουάρ.
Όπως βλέπετε, τα μοτεράκια αυτά έρχονται με διάφορες ταχύτητες περιστροφής και με διάφορες ροπές, με γενική αρχή “όσο μικρότερη ταχύτητα τόσο μεγαλύτερη ροπή”.
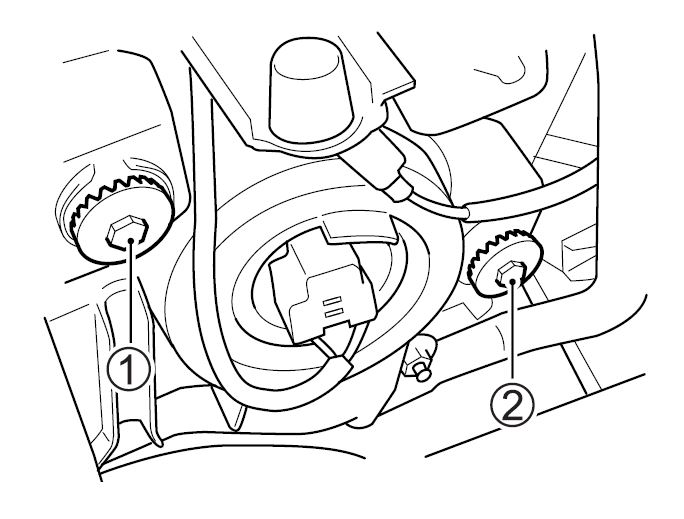
Για να καταλήξω στο ποια μοτεράκια θα προμηθευόμουν, έπρεπε να προσδιορίσω τη ροπή που απαιτούνταν για να περιστραφούν οι χειροκίνητοι ρυθμιστές. Ο πιο γρήγορος τρόπος που μπόρεσα να σκεφτώ ήταν με κάποιο απλό δυναμόκλειδο. Από τις δοκιμές που έκανα σε σπασμένο φανάρι, που παραχώρησε ευγενικά για το σκοπό αυτό ο καλός μου φίλος Μηνάς Καραλής (Moto Revolution), προέκυψε ότι η απαιτούμενη ροπή ήταν κάτω από 3 Nm (ή 425 oz-in).
Τελικά και έπειτα από συμβουλή των (τρελαμένων με τα ρομποτικά) Αμερικανών να διαλέξω μοτεράκια με τη διπλάσια απαιτούμενη ροπή, παρήγγειλα αυτά:

Στα μοτεράκια αυτά ο άξονας περιστροφής έχει διατομή σχήματος “D” και διαμέτρου 4mm. Για να μπορέσω από τον άξονα αυτόν να καταλήξω σε ένα εξάγωνο καρυδάκι των 8mm που απαιτούσαν οι ρυθμιστές, έγιναν τα παρακάτω:
1) Ένας από τους αντάπτορες της ίδιας εταιρείας που προσαρμόζονταν στον άξονα και έβγαζε έξοδο σε 3/8″


κόπηκε και αφαιρέθηκε η έξοδος των 3/8″. Στο τμήμα που παρέμεινε (αυτό που προσαρμόζεται στον άξονα) έγινε μια πατουρίτσα. Στη φώτο φαίνεται ένας αντάπτορας πριν την κοπή και ένας μετά.

2) Παρόμοια κοπή έγινε και σε εξάγωνο καρυδάκι των 8mm. Εδώ παρέμεινε το τμήμα με την εξάγωνη έξοδο των 8mm.

3) Τα δύο τμήματα που κρατήθηκαν

ήρθαν εις γάμου κοινωνία με ασημοκόλληση.


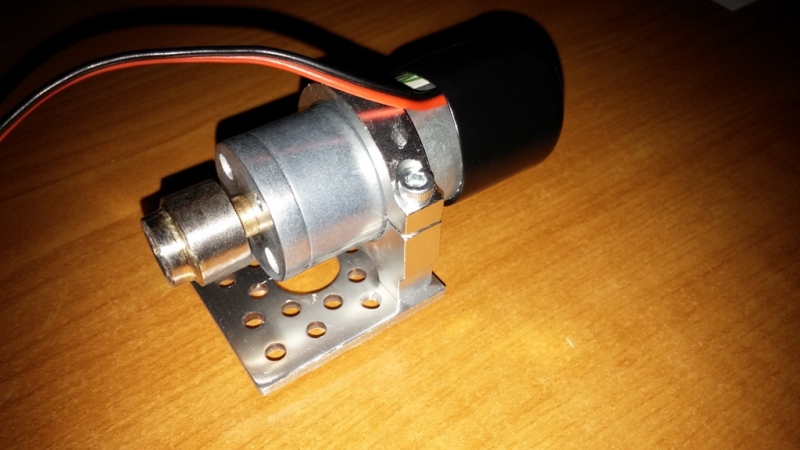
4) Ο νέος αντάπτορας τοποθετήθηκε στον άξονα του μοτέρ και πλέον το μοτεράκι μπορεί να προσαρμοστεί απευθείας στους χειροκίνητους ρυθμιστές.

Μετά την κατασκευή του νέου αντάπτορα, με τον οποίο λύθηκε το θέμα της μετάδοσης της κίνησης, πήρε σειρά το θέμα της στήριξης των μοτέρ επί του (υπο)πλαισίου. Πρώτα προσαρμόστηκαν τα απαραίτητα αξεσουάρ της εταιρείας στα μοτέρ.
Τα μοτεράκια των 2 ακριανών ρυθμιστών στερεώθηκαν απευθείας στο υποπλαίσιο χρησιμοποιώντας μόνο τα αξεσουάρ της εταιρείας και tie-wraps (σε πρώτο πλάνο στη φώτο, η οποία έχει ληφθεί από κάτω προς τα πάνω)

Για τα υπόλοιπα 2 μοτεράκια των μεσαίων ρυθμιστών φτιάχτηκε μια συνδυασμένη κατασκευή από αλουμίνιο και καοτσούκ,


προκειμένου να στερεωθεί στο υποπλαίσιο.


Και εδώ όλα τα μωρά σε παράταξη.

Τέλος, ιδού το χειριστήριο.
